HMC5883L عبارة عن حساس بوصلة رقمية ثلاثية المحاور XYZ تستخدم لغرضين عامين: لقياس مغنطة مادة مغناطيسية مثل المغناطيس الحديدي ، أو لقياس القوة المغناطيسية ، وفي بعض الحالات ، اتجاه المجال المغناطيسي عند نقطة في الفضاء. الاتصال مع HMC5883L بسيط ويتم كل ذلك من خلال بروتوكول I2C.
يمكن تشغيل هذا الحساس بمستويات جهد من 3 الى 5 فولت .
هذا الحساس قليل الاستخدام في التطبيقات العادية ولكنه شائع الاستخدام في الروبوتات المتحركة وتطبيقات مراقبة حالة الجو المتقدمة .
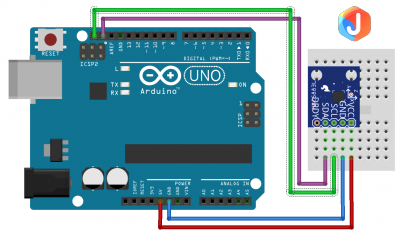
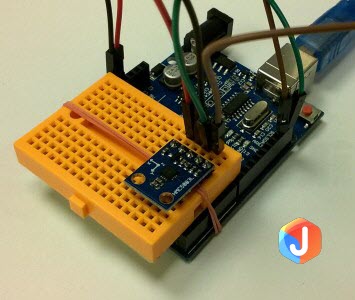
ونظراً لكون هذا الحساس يستخدم بروتوكول I2C فتوصيله بمختلف المتحكمات (كالاردوينو) بسيط وسهل حيث نحتاج لمنفذين فقط لنقل البيانات SDA ,SCL (اضافة لمنافذ التغذية الكهربائية).