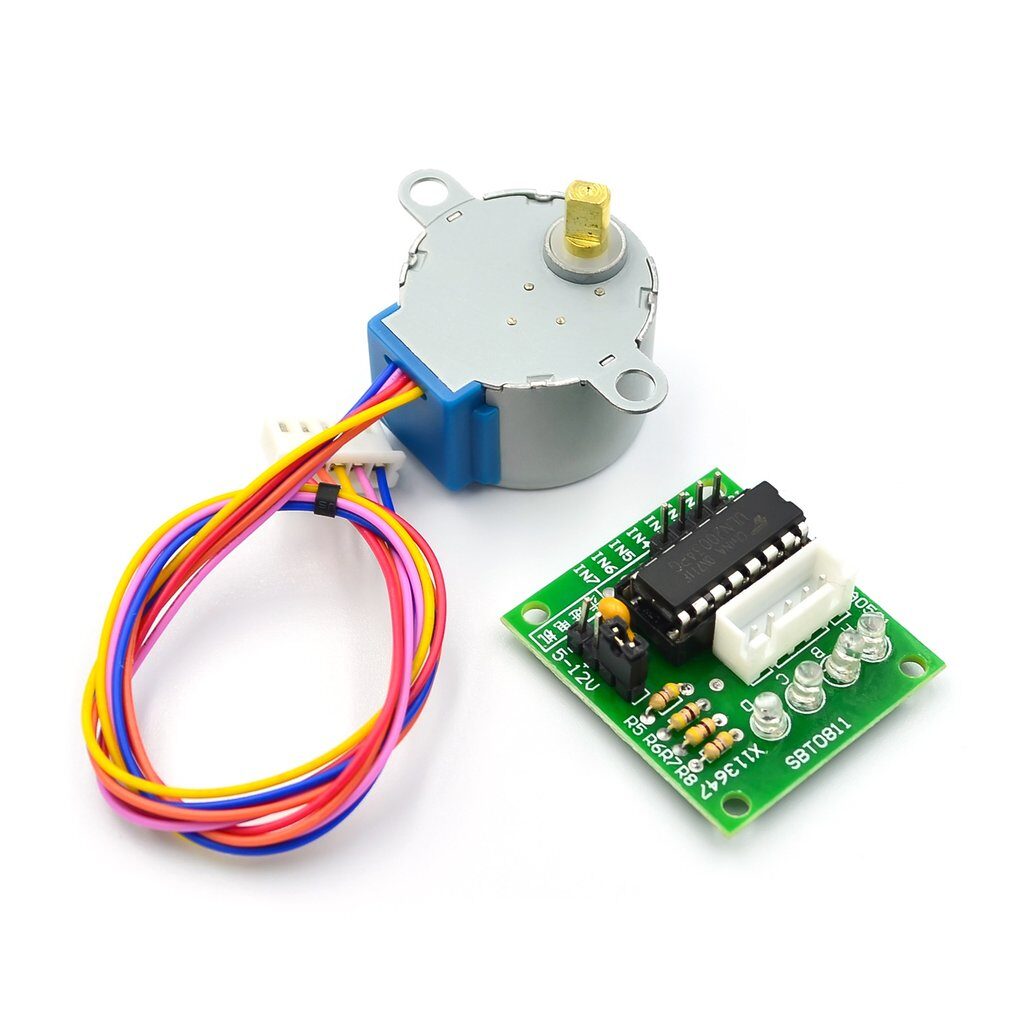
محرك الخطوة هو أحد أنواع المحركات الكهربائية الميكانيكية . ولعلها الأدق من ناحية التحكم بالسرعة و زاوية الوقوف. محركات الخطوة لها تركيب و نظرية عمل تختلف عن المحركات السابقة و يكون معها عادة دائرة تحكم لتكبير التيار اللازم للتشغيل. يمكن تقسيم محركات الخطوة إلى قسمين بشكل عام
Bipolar
Unipolar
وجود طرفین لكل ملف یمكن
التحكم بھما وعكس القطبیة
وجود طرف واحد للتحكم
بكل ملف.
یحتاج لـ bridge-H مثل L2093D و یعطیك عزم
أقوى (torque)
یحتاج دائرة تكبیر بسیطة مثل U
صندوق التروس box Gear وعدد الخطوات steps/rev
كما نرى في الرسم التالي فإن الدورة الواحدة تتكون من 4 أقطاب وتحتاج 4 خطوات. ولكن في معظم المحركات نحن نستخدم صندوق التروس box gear لزيادة القوة مع إنقاص السرعة. هذا يجعل الدورة الواحدة التي تراها تحتاج إلى 100 أو 200 خطوة ! ستجد عدد الخطوات اللازمة لإكمال دورة في مواصفات كل محرك. واذا لم تعرف خطوات المحرك الذي معك ولكن وجدت زاوية الخطوة (مثلا:2.7) فاقسم 360 على الزاوية لتعرف عدد الخطوات. المحرك الذي سنستخدمه في التجربة (48-28BYJ) من نوع Unipolar وتنقسم الدورة الواحدة فيه إلى 64 خطوة وسوف نشغله بسرعة 60 خطوة في الثانية وبطريقة (4 (أسلاك تحكم.
التوصيل
بعد توصيل المحرك بدائرة التحكم نوصل الطاقة للدائرة و نقوم بتوصيل منافذ دائرة التحكم (IN1,IN2,IN3,IN4) بمنافذ الأرديونو (8,9,10,11).
تشغيل المحرك في الاتجاهين
بعد تضمين المكتبة يتم تحديد عدد الخطوات للدورة الواحدة في المحرك
revolution per steps وإنشاء كائن instance -object مع تعريف الخصائص (الخطوات ، و المنافذ المستخدمة). لاحظ أن ترتيب الأرقام للمنافذ مهم _ إذا لم يدر المحرك بالشكل المطلوب غير ترتيب المنافذ. داخل setup نحدد سرعة الدوران (كم دورة في الدقيقة rpm ( لكل محرك حد أقصى للسرعة). أخيرا إذا أحببت متابعة كل طرف و التأكد من خطوات التشغيل ؛ أنقص السرعة إلى (1). الأمر step.object يحدد عدد الخطوات ، ففي المثال سـيدور المحرك ثلاث دورات .
ثم يتوقف لنصف ثانية ، ثم يدور في الاتجاه المعاكس لـ 500 خطوة.