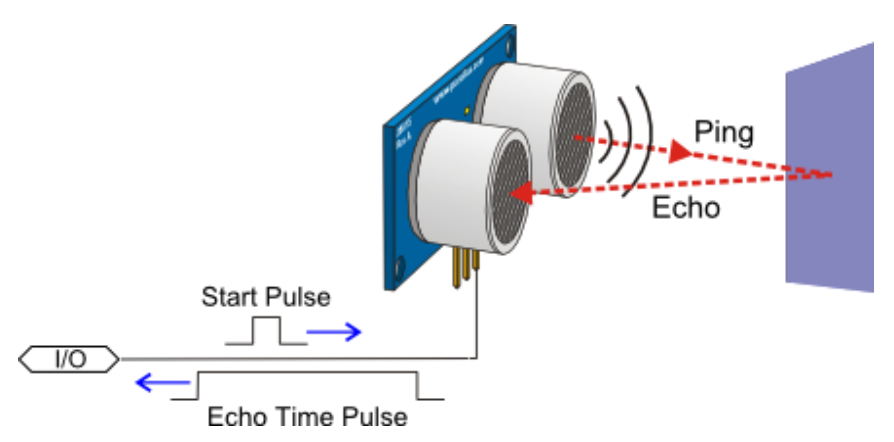
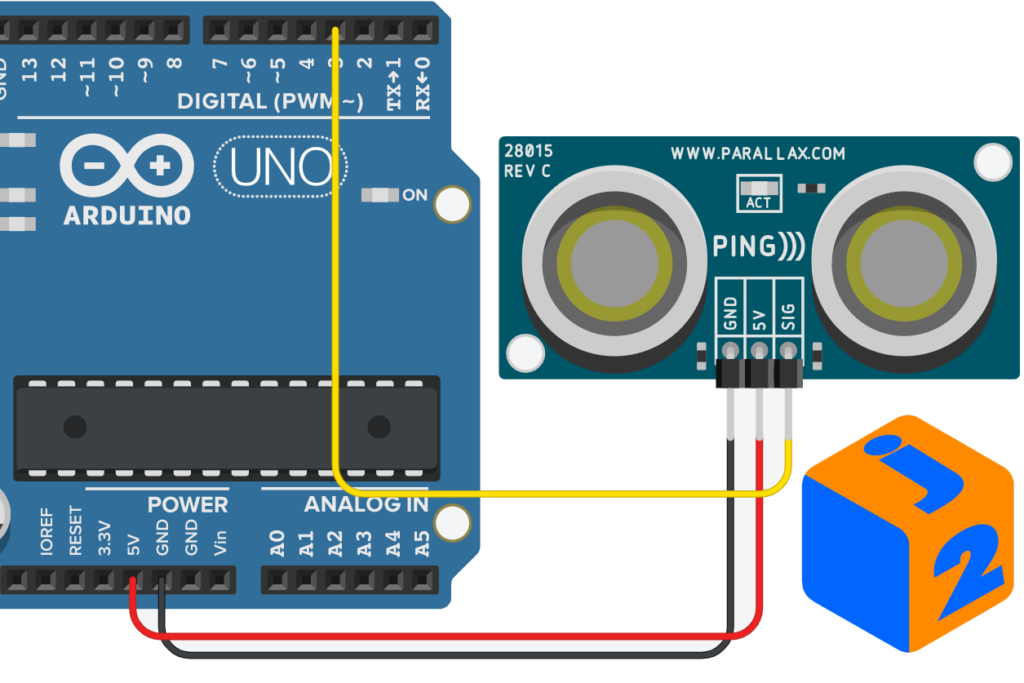
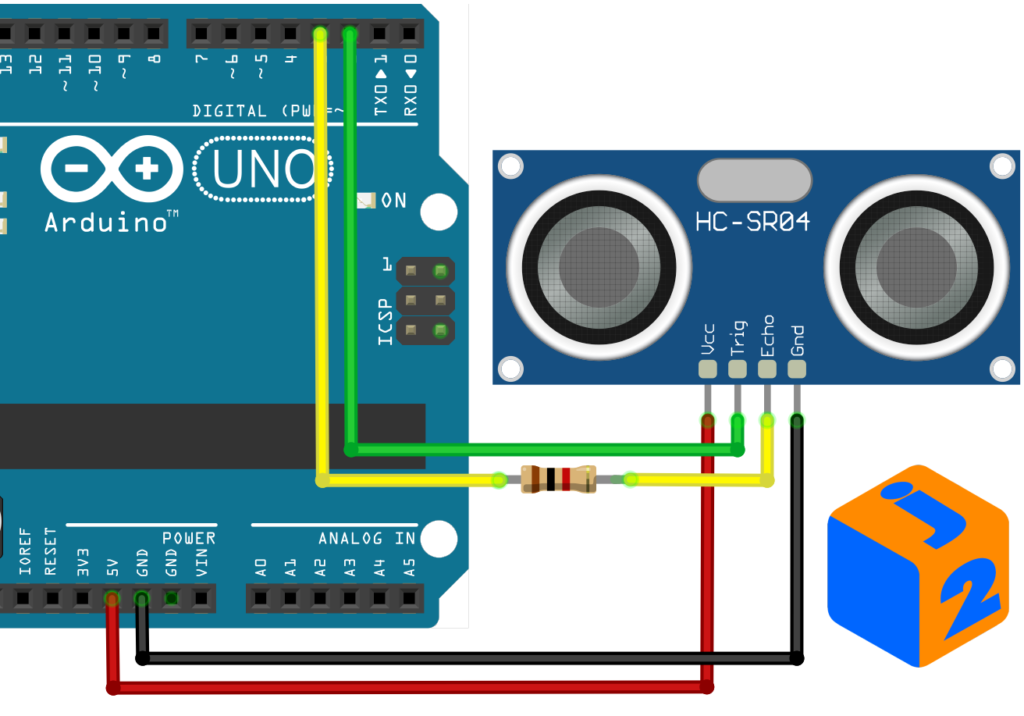
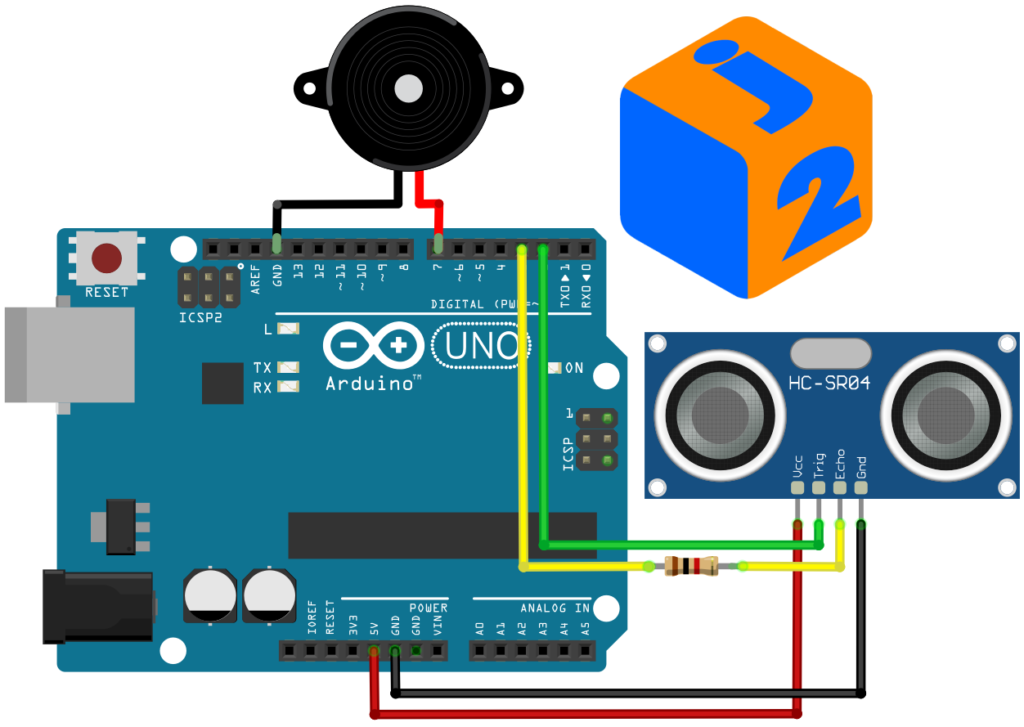
لاحظ استخدام الأمر pulseIn الذي يعمل على قياس عرض النبضة القادمة من الحساس إلى الأردوينو بالمايكرو ثانية. يجب تحويل المنفذ من خرج إلى دخل في حالة استخدام الحساس بـ 3 أطراف حيث أن المنفذ ذاته يتسخدم للإرسال والإستقبال. في حالة استخدام حساس رباعي الأرجل يجب عليك تغير أرقم المنافذ داخل البرنامج ليتناسب مع التوصيل حيث ان البرنامج التالي مخصص إرسال (Ping) و استقبال (echo) عبر المنفذ (3).