عندما يطلق الحساس الموجة فوق الصوتية نبدأ بحساب الزمن من إطلاق الموجة لحين ارتدادها مرة أخرى. وبما أن سرعة الصوت ثابتة والزمن أصبح معلوم بالنسبة لنا يمكننا معرفة المسافة بهذه المعادلة البسيطة .
المسافة = السرعة * الزمن
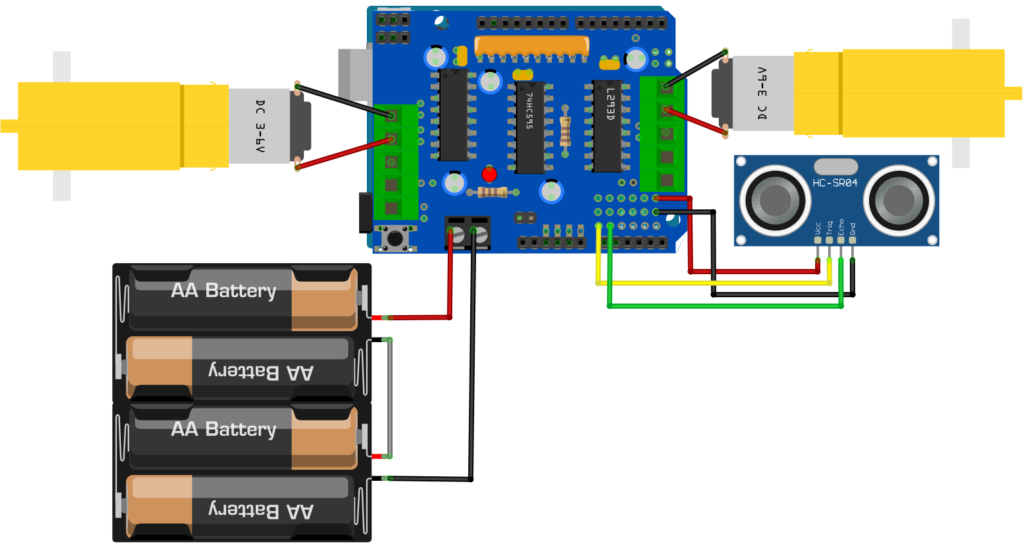
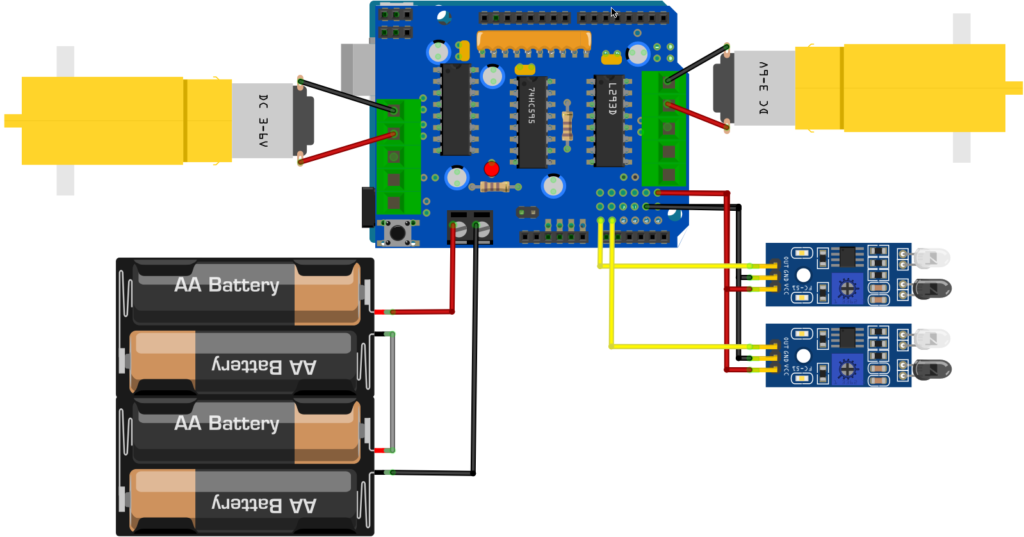
يتم تفعيل الحساس لاطلاق موجات باعطائه قيمة HIGH لمنفذ الـ Trig لمدة عشرة مايكروثانية. بعد ذلك يمكن معرفة المدة الزمنية باستخدام الدالة (pulseIn(echoPin, HIGH وتستخدم الدالة pulseIn لحساب الفترة الزمنية لتغير حالة المنفذ
من LOW لـ HIGH.
سرعة الصوت في الهواء تساوي 340.29 متر للثانية الواحدة الذي يساوي
0.034 سم/مايكروثانية. القيام بهذا التحويل مطلوب للحصول على المسافة بوحدة السنتميتر. كما يتم قسمة الزمن على 2 لان الزمن الذي تم الحصول عليه هو زمن انطلاق الموجة وارتدادها اي انه ضعف الزمن بين السيارة والجسم.
لاحظ أن الكود يقوم بتوجيه السيارة للحركة للأمام ما دامت الماسافة اكبر من 20 سم اما في حال كانت المسافة مساوية لـ 20 أو اقل تقوم السيارة بالوقوف والدواران نحو اليمين (بتحريك العجل في الجهة اليسرى نحو الأمام والعجل في الجهة اليسرى نحو الخلف) لمدة نصف ثانية ومن ثم تعود للحركة في اتجاه الامام. يمكنك تغير الحركة لاي جهة تريدها مثلا يمكنك جعل السيارة تتجه نحو اليسار بدلا من اليمين عند وصول المسافة لـ 20سم .